Ikan asin merupakan pengolahan ikan yang
telah diawetkan dengan cara penggaraman dan pengeringan. Pengeringan ikan
masih dengan cara tradisional dengan menjemurnya di bawah sinar matahari
untuk mengurangi kadar air pada daging ikan, namun masalah yang sering
terjadi, yaitu perubahan cuaca secara tiba-tiba, yang menyebabkan ikan
asin mengalami kerusakan pada daging ikan. Oleh karena itu, diperlukan
suatu sistem monitoring dan secara otomatis dapat memantau cuaca, suhu,
dan kontrol atap.
Pada sistem monitoring dan otomatisasi
penjemuran ikan asin ini, digunakan sensor hujan untuk mendeteksi kondisi
cuaca, sensor DHT22 untuk memantau suhu dan kelembaban udara, serta sensor
LDR untuk mendeteksi intensitas cahaya. Selain itu, sistem juga dilengkapi
sensor PIR untuk mendeteksi pergerakan di sekitar area penjemuran. Output
sistem terdiri dari buzzer yang diaktifkan baik oleh sensor PIR maupun
kombinasi input dari sensor hujan dan LDR sebagai indikasi kondisi tidak
aman atau tidak optimal untuk penjemuran. Informasi suhu dan kelembaban
ditampilkan melalui LCD I2C yang dikendalikan berdasarkan input dari
sensor DHT22. Seluruh komponen dikendalikan oleh mikrokontroler STM32,
dengan komunikasi antar perangkat dilakukan melalui UART (TX ke RX STM32)
dan protokol I2C untuk koneksi ke LCD. Pemrograman sistem dilakukan
menggunakan software Arduino IDE.
Dengan memantau suhu, kelembaban,
intensitas cahaya, dan kondisi cuaca secara real-time, sistem dapat
memastikan ikan asin dijemur pada kondisi lingkungan yang ideal agar
hasil pengeringan maksimal dan berkualitas.
b. Mencegah kerusakan akibat cuaca tidak menentu
Sistem dapat secara otomatis mendeteksi
hujan dan rendahnya pencahayaan, lalu memberikan respons seperti
menyalakan buzzer atau menyampaikan informasi ke pengguna, sehingga ikan
tidak terpapar air hujan atau kelembaban berlebih.
c. Meningkatkan efisiensi dan mengurangi intervensi manual
Dengan adanya sensor dan output
otomatis, sistem ini meminimalkan kebutuhan pengawasan langsung oleh
manusia selama proses penjemuran, terutama dalam hal pengawasan cuaca
dan kondisi lingkungan sekitar.
d. Menjaga keamanan area penjemuran
Sensor PIR mendeteksi gerakan di
sekitar lokasi jemuran dan mengaktifkan buzzer sebagai alarm, berfungsi
sebagai sistem keamanan untuk mencegah pencurian atau gangguan dari
hewan liar.
e. Menyediakan informasi lingkungan secara real-time
Melalui LCD I2C, pengguna dapat
langsung melihat suhu dan kelembaban saat ini, sehingga bisa mengambil
keputusan yang cepat dan tepat bila diperlukan.
f. Memanfaatkan komunikasi data antarperangkat yang efisien
Dengan penggunaan komunikasi UART dan
I2C, sistem memastikan pertukaran data antar komponen berjalan efisien
dan sinkron, mendukung kerja sistem yang responsif dan real-time.
- Catu Daya : 5 V - Output
Arus : 100 mA - Output
Sinyal : TTL - Sensitifitas
: Dapat disesuaikan sesuai kebutuhan dengan potensiometer - Dilengkapi indikator LED - Sensor dan panel kontrol dipisah untuk mendapatkan kinerja
yang optimal - Dimensi
Panel Kontrol : 30 x 16 mm
- Dimensi Sensor : 54 x 40 mm
5. Sensor PIR
Spesifikasi:
Jarak pendeteksian : +/- 6 m.
Menggunakan 1 pin output.
Dua jenis output :
Continuous high/low.
High-low pulse.
Terdapat jumper konfigurasi pemilihan output.
Menggunakan header 3x1 dengan pitch 2.54 mm.
Tegangan kerja : 3.3 VDC - 5 VDC.
Dimensi : 32.2 mm x 24.3 mm x 25.4 mm.
Kompatibel dengan berbagai macam mikrokontroler.
6. Motor Servo
Spesifikasi:
Jarak pendeteksian : +/- 6 m.
Menggunakan 1 pin output.
Dua jenis output :
Continuous high/low.
High-low pulse.
Terdapat jumper konfigurasi pemilihan output.
Menggunakan header 3x1 dengan pitch 2.54 mm.
Tegangan kerja : 3.3 VDC - 5 VDC.
Dimensi : 32.2 mm x 24.3 mm x 25.4 mm.
Kompatibel dengan berbagai macam mikrokontroler.
7. Buzzer
Spesifikasi:
1. Tegangan kerja: 4v-8v DC (optimal 5v)
2. Arus max: 30mA / 5vDC
3. Kekuatan suara max: 85dB / 10cm
4. Frek resonansi: 2500 +/- 300hz
5. Suhu kerja: -20 ~ +70 C
6. Warna: hitam
7. Diameter: 1cm
8. LCD I2C
Spesifikasi:
- Warna Backlight : hijau
- Warna Text : hitam
- Koneksi ke mcu : i2C (SDA SCL) / 0x27
- i2C Address : 0x3F / 0x27
- Lebih hemat GPIO karena hanya menggunakan 2wire saja (port SDA dan SCL)
UART (Universal Asynchronous Receiver-Transmitter) adalah bagian perangkat keras komputer yang menerjemahkan antara
bit-bit paralel data dan bit-bit serial. UART biasanya berupa sirkuit
terintegrasi yang digunakan untuk komunikasi serial pada komputer atau
port serial perangkat periperal.
Cara Kerja Komunikasi UART
Data dikirimkan secara paralel dari data bus
ke UART1. Pada UART1 ditambahkan start bit, parity bit, dan stop bit
kemudian dimuat dalam satu paket data. Paket data ditransmisikan secara
serial dari Tx UART1 ke Rx UART2. UART2 mengkonversikan data dan menghapus
bit tambahan, kemudia di transfer secara parallel ke data bus penerima.
2. Pulse Width Modulation (PWM)
PWM (Pulse Width Modulation) adalah teknik
modulasi yang mengubah lebar pulsa (duty cycle) sementara amplitudo dan
frekuensi tetap konstan. Satu siklus pulsa terdiri dari kondisi high dan
transisi ke kondisi low. Lebar pulsa PWM sebanding dengan amplitudo sinyal
asli yang belum dimodulasi. Duty cycle adalah rasio antara waktu ON (lebar
pulsa High) dan periode total, biasanya dinyatakan dalam persentase (%).
duty cycle pwm
Keterangan :
t_ON = waktu ON atau waktu
dimana tegangan keluaran berada pada posisi tinggi (high atau 1)
t_OFF = waktu OFF atau waktu
dimana tegangan keluaran berada pada posisi rendah (low atau 0)
t_total= waktu satu siklus atau
penjumlahan antara t_ON dengan t_OFF atau disebut juga dengan “periode
satu gelombang”
Pada board Arduino Uno, pin yang dapat
digunakan untuk PWM adalah pin yang ditandai dengan tanda tilde (~), yaitu
pin 3, 5, 6, 9, 10, dan 11. Pin-pin ini dapat berfungsi sebagai input atau
output analog. Untuk menggunakan PWM pada pin tersebut, gunakan perintah
analogWrite().
PWM pada Arduino beroperasi pada frekuensi 500Hz, yang berarti ada 500
siklus per detik. Setiap siklus dapat diberi nilai antara 0 hingga 255.
Jika nilai 0 diberikan, pin tersebut akan selalu berada pada 0 volt. Jika
nilai 255 diberikan, pin akan selalu berada pada 5 volt. Memberikan nilai
127 (setengah dari 255 atau 50%) akan membuat pin berada pada 5 volt
selama setengah siklus dan 0 volt selama setengah siklus lainnya.
Memberikan nilai 64 (25% dari 255) akan membuat pin berada pada 5 volt
selama 1/4 siklus dan 0 volt selama 3/4 siklus, dan ini terjadi 500 kali
dalam satu detik.
3. Inter Integrated Circuit (12C)
Inter Integrated Circuit atau
sering disebut I2C adalah standar komunikasi serial dua arah
menggunakan dua saluran yang didisain khusus untuk mengirim
maupun menerima data. Sistem I2C terdiri dari saluran SCL
(Serial Clock) dan SDA (Serial Data) yang membawa informasi
data antara I2C dengan pengontrolnya.
Cara Kerja Komunikasi
12C
Pada I2C, data
ditransfer dalam bentuk message yang terdiri dari
kondisi start, Address Frame, R/W bit, ACK/NACK bit,
Data Frame 1, Data Frame 2, dan kondisi Stop.
Kondisi start dimana saat pada SDA beralih dari logika
high ke low sebelum SCL.
Kondisi stop dimana saat pada SDA beralih dari logika
low ke high sebelum SCL.
R/W bit berfungsi untuk menentukan apakah master
mengirim data ke slave atau meminta data dari slave.
(logika 0 = mengirim data ke slave, logika 1 = meminta
data dari slave)
ACK/NACK bit berfungsi
sebagai pemberi kabar jika data frame ataupun address
frame telah diterima receiver.
4. STM32F103C8T6
STM32F103C8T6 merupakan salah satu jenis
mikrokontroler dari keluarga STM32 yang diproduksi
oleh STMicroelectronics. Mikrokontroler ini
termasuk dalam seri STM32F1 dan berbasis pada inti
prosesor ARM Cortex-M3 32-bit. Dengan kecepatan
clock hingga 72 MHz, STM32F103C8T6 menawarkan
performa yang tinggi serta efisiensi dalam
konsumsi daya, menjadikannya sangat populer dalam
berbagai aplikasi sistem tertanam (embedded
system). Mikrokontroler ini dilengkapi dengan
memori flash sebesar 64 KB dan SRAM sebesar 20 KB,
serta mendukung hingga 37 pin input/output (GPIO)
yang dapat dikonfigurasi sesuai kebutuhan
pengguna.
Selain itu,
STM32F103C8T6 memiliki beragam fitur pendukung
seperti ADC 12-bit hingga 10 kanal, beberapa jenis
komunikasi serial seperti UART, SPI, dan I2C, serta
dilengkapi juga dengan USB 2.0 Full-Speed.
Mikrokontroler ini memiliki beberapa timer yang bisa
digunakan untuk berbagai keperluan, seperti
pengendalian motor, pengukuran waktu, atau pembuatan
sinyal PWM. Arsitektur yang digunakan juga sudah
mendukung sistem interrupt dengan menggunakan NVIC
(Nested Vectored Interrupt Controller), sehingga
respon terhadap kejadian eksternal bisa dilakukan
secara efisien.
Dalam proses
pengembangannya, STM32F103C8T6 dapat diprogram
menggunakan beberapa platform seperti STM32CubeIDE,
Keil uVision, ataupun PlatformIO, dan bisa diakses
melalui programmer seperti ST-Link V2 atau USB to
Serial menggunakan bootloader. Untuk mempermudah
pemrograman, STMicroelectronics menyediakan library
seperti HAL (Hardware Abstraction Layer) dan LL (Low
Layer) yang mempermudah akses ke fitur-fitur
perangkat keras.
Spefikasi:
Fitur-Fitur Utama
- USB 2.0 Full-Speed
- 12-bit ADC hingga 10 channel
- DMA Controller
- Up to 7 timers (PWM, encoder interface, input
capture, output compare)
- Real-Time Clock (RTC)
- Nested Vectored Interrupt Controller (NVIC)
- LED Power Indicator
5. Rain Sensor
Rain sensor
atau sensor hujan adalah perangkat
elektronik yang digunakan untuk mendeteksi
keberadaan dan intensitas air hujan. Sensor
ini umumnya terdiri dari sebuah plat
konduktif dengan pola jejak tembaga yang
terbuka (seperti jaring), yang bekerja
berdasarkan prinsip perubahan resistansi.
Saat plat sensor dalam kondisi kering,
resistansinya tinggi sehingga arus listrik
tidak mudah mengalir. Namun, ketika tetesan
air hujan membasahi permukaan sensor, air
(sebagai penghantar) menyebabkan penurunan
resistansi sehingga arus dapat mengalir
lebih mudah antara jalur-jalur konduktif
tersebut. Perubahan ini dapat dideteksi
sebagai sinyal analog atau digital
tergantung jenis output sensor yang
digunakan.
Pada sistem
yang menggunakan sinyal analog, output dari
rain sensor biasanya dihubungkan ke pin ADC
(Analog to Digital Converter) pada
mikrokontroler. Nilai tegangan analog yang
terbaca mencerminkan tingkat kekeringan atau
kebasahan sensor: nilai tinggi menunjukkan
kondisi kering, dan nilai rendah menandakan
adanya air hujan. Sensor ini dapat
dikalibrasi dengan menetapkan batas minimum
dan maksimum nilai ADC untuk mengonversi
data menjadi persentase tingkat kelembaban
atau intensitas hujan. Berikut grafik respon
dari sensor rain:
Spesifikasi :
- Catu Daya : 5 V
- Output Arus : 100 mA
- Output Sinyal : TTL
- Sensitifitas : Dapat disesuaikan
sesuai kebutuhan dengan
potensiometer
- Dilengkapi indikator LED
- Sensor dan panel kontrol dipisah
untuk mendapatkan kinerja yang
optimal
- Dimensi Panel Kontrol : 30 x 16
mm
- Dimensi Sensor : 54 x 40 mm
Pinout Sensor Rain:
Pin1 (VCC) : 3.3V DC hingga 5V
DC
Pin2 (GND) : Ini adalah pin
ground
Pin3 (A0) : Ini adalah pin analog
output
Ping4(D0) : Ini adalah pin digital
output.
6. LCD
LCD (Liquid Crystal Display) adalah suatu jenis media tampilan yang menggunakan kristal cair sebagai penampil utama. LCD (Liquid Crystal Display) bisa menampilkan suatu gambar/karakter dikarenakan terdapat banyak sekali titik cahaya (piksel) yang terdiri dari satu buah kristal cair sebagai titik cahaya. LCD 16x2 dapat menampilkan sebanyak 32 karakter yang terdiri dari 2 baris dan tiap baris dapat menampilkan 16 karakter. Bentuk fisik LCD 16x2 dapat dilihat pada gambar dibawah ini.
Bagian-bagian LCD atau Liquid Crystal Display diantaranya adalah :
•Lapisan Terpolarisasi 1 (Polarizing Film 1)
•Elektroda Positif (Positive Electrode)
•Lapisan Kristal Cair (Liquid Cristal Layer)
•Elektroda Negatif (Negative Electrode)
•Lapisan Terpolarisasi 2 (Polarizing film 2)
•Backlight atau Cermin (Backlight or Mirror)
Dibawah ini adalah gambar struktur dasar sebuah LCD :
7. Sensor LDR
Sensor LDR (Light Dependent Resistor), atau sering disebut sebagai fotodiode atau fotoresistor, adalah komponen pasif yang nilai resistansinya berubah-ubah tergantung pada intensitas cahaya yang mengenainya. Semakin terang cahaya yang mengenai permukaan LDR, resistansinya akan semakin menurun. Sebaliknya, semakin gelap kondisi di sekitar LDR, resistansinya akan semakin meningkat. Karakteristik ini membuatnya sangat cocok untuk mendeteksi tingkat cahaya.
LDR umumnya terbuat dari bahan semikonduktor seperti kadmium sulfida (CdS) atau kadmium selenida (CdSe). Bahan-bahan ini memiliki resistansi yang tinggi dalam keadaan gelap. Ketika foton cahaya menumbuk material semikonduktor, mereka memberikan energi kepada elektron, menyebabkan elektron-elektron tersebut bergerak dari pita valensi ke pita konduksi. Proses ini menghasilkan elektron bebas dan hole, yang meningkatkan konduktivitas material dan dengan demikian menurunkan resistansinya.
Sel Resistor Tergantung Cahaya atau Cell Light Dependent Resistor (LDR) adalah Sensor cahaya photoresistif yang paling umum digunakan adalah sel fotokonduktif Cadmium Sulphide ORP12. Resistor yang bergantung pada cahaya ini memiliki respon spektral sekitar 610nm di wilayah cahaya kuning ke oranye.
Resistansi sel ketika tidak menyala (resistansi gelap) sangat tinggi pada sekitar 10MΩ yang jatuh ke sekitar 100Ω ketika sepenuhnya diterangi (resistansi terang).
Untuk meningkatkan resistansi gelap dan karenanya mengurangi arus gelap, jalur resistif membentuk pola zig-zag melintasi substrat keramik. Photocell CdS adalah perangkat dengan biaya sangat rendah yang sering digunakan dalam peredupan otomatis, deteksi gelap atau senja untuk menyalakan lampu jalan "ON" dan "OFF", dan untuk aplikasi jenis meteran eksposur fotografi.
Menghubungkan resistor yang tergantung cahaya (LDR) secara seri dengan Resistor standar seperti ini di satu tegangan supply DC memiliki satu keuntungan besar, tegangan yang berbeda akan muncul di persimpangan mereka untuk berbagai tingkat cahaya.
Jumlah drop tegangan seri resistor, R 2 ditentukan oleh nilai resistif dari cahaya resistor tergantung, RLDR. Kemampuan ini untuk menghasilkan tegangan yang berbeda menghasilkan rangkaian yang sangat berguna yang disebut "Beda Potensial" atau Jaringan Pembagi Tegangan.
Seperti yang kita ketahui, arus melalui rangkaian seri adalah umum dan karena LDR mengubah nilai resistifnya karena intensitas cahaya, tegangan yang ada pada VOUT akan ditentukan oleh rumus pembagi tegangan.
Resistansi LDR, RLDR dapat bervariasi dari sekitar 100Ω di bawah sinar matahari, hingga lebih dari 10MΩ dalam kegelapan absolut dengan variasi resistansi ini diubah menjadi variasi tegangan pada VOUT seperti yang ditunjukkan.
8. Sensor PIR
9. Motor Servo
Servo motor adalah jenis servo motor standar yang paling umum ditemui dalam proyek-proyek elektronika dan robotika. Dinamakan demikian karena kemampuannya untuk memutar porosnya dalam rentang sudut sekitar0 hingga 180 derajat. Batasan putaran ini menjadikannya ideal untuk aplikasi yang memerlukan pergerakan sudut yang spesifik dan terkontrol,bukan putaran terus-menerus.
Dasar teori servo motor 180 derajat sama dengan servo motor pada umumnya, yaitu menggunakan sistem kendaliclosed-loop(umpan balik). Ini berarti motor secara terus-menerus membandingkan posisi yang diinginkan dengan posisi aktualnya dan melakukan koreksi jika ada perbedaan.
Komponen utama servo motor meliputi:
Motor DC: Sumber tenaga utama yang menggerakkan poros.
Gearbox (Kotak Roda Gigi): Serangkaian roda gigi yang terhubung ke motor DC. Fungsi gearbox adalah untuk mengurangi kecepatan putaran motor DC dan pada saat yang sama meningkatkan torsi (kekuatan putaran). Ini memungkinkan servo untuk menggerakkan beban yang lebih berat dengan presisi.
Potensiometer: Sensor posisi yang terhubung ke poros output. Potensiometer ini berfungsi sebagai umpan balik untuk memberi tahu sirkuit kontrol posisi aktual poros servo. Resistansinya berubah seiring dengan perubahan sudut poros.
Sirkuit Kontrol: Otak dari servo. Sirkuit ini menerima sinyal perintah (biasanya berupa sinyal Pulse Width Modulation atau PWM) dari mikrokontroler atau perangkat kontrol lainnya. Sirkuit ini kemudian membandingkan lebar pulsa sinyal PWM (posisi yang diinginkan) dengan nilai resistansi dari potensiometer (posisi aktual). Jika ada perbedaan, sirkuit akan menginstruksikan motor DC untuk bergerak hingga posisi aktual sesuai dengan posisi yang diinginkan.
Cara Kerja:
Servo motor dikendalikan menggunakan sinyal PWM (Pulse Width Modulation). Sinyal PWM adalah serangkaian pulsa yang dikirim ke pin sinyal servo. Lebar (durasi) pulsa inilah yang menentukan sudut posisi poros servo.
Prinsip kerjanya adalah sebagai berikut:
Servo mengharapkan untuk menerima pulsa sinyal PWM setiap 20 milidetik (ms), yang setara dengan frekuensi 50 Hz.
Lebar pulsa (durasi ON) dari sinyal PWM inilah yang mengontrol sudut putaran:
Pulsa sekitar 1 ms biasanya akan memutar poros servo ke posisi 0 derajat.
Pulsa sekitar 1.5 ms akan memutar poros servo ke posisi 90 derajat (posisi tengah/netral).
Pulsa sekitar 2 ms akan memutar poros servo ke posisi 180 derajat.
Durasi pulsa di antara nilai-nilai tersebut akan menginterpolasi posisi sudut servo. Misalnya, pulsa 1.25 ms mungkin akan memposisikan servo pada 45 derajat.
Sirkuit kontrol internal servo akan terus-menerus memantau posisi poros melalui potensiometer. Jika posisi aktual tidak sesuai dengan posisi yang diperintahkan oleh sinyal PWM, sirkuit akan menggerakkan motor hingga posisi yang diinginkan tercapai. Setelah itu, motor akan berhenti dan menahan posisi tersebut sampai sinyal PWM berubah.
Aplikasi Servo Motor
Servo motor 180 derajat sangat populer karena kesederhanaan kontrolnya dan kemampuannya untuk mencapai posisi sudut yang akurat. Beberapa aplikasi umumnya meliputi:
Robotika: Sebagai sendi pada lengan robot mini, penggerak gripper (penjepit), atau kepala robot untuk menggerakkan sensor atau kamera.
Kendaraan Remote Control (RC): Untuk sistem kemudi pada mobil RC, atau kontrol aileron, elevator, dan rudder pada pesawat RC.
Sistem Otomasi dan Kontrol: Menggerakkan katup, pengunci pintu otomatis, atau mekanisme kecil lainnya yang memerlukan pergerakan sudut terbatas.
Proyek Arduino/Mikrokontroler: Sangat sering digunakan dalam berbagai proyek hobi karena mudah diintegrasikan dengan mikrokontroler populer seperti Arduino.
Kamera Pan-Tilt: Untuk mengontrol orientasi horizontal (pan) dan vertikal (tilt) dari sebuah kamera kecil.
Servo motor 180 derajat adalah pilihan yang tepat ketika Anda membutuhkan kontrol posisi sudut yang presisi dalam rentang terbatas, bukan putaran kontinu.
10. Buzzer
Perangkat sinyal audio seperti beeper atau buzzer dapat berupa tipe elektromekanis, piezoelektrik , atau mekanis. Fungsi utamanya adalah mengubah sinyal dari audio menjadi suara. Umumnya, perangkat ini ditenagai oleh tegangan DC dan digunakan dalam timer, perangkat alarm, printer, alarm, komputer, dll. Berdasarkan berbagai desainnya, perangkat ini dapat menghasilkan berbagai suara seperti alarm, musik, bel, dan sirene.
Konfigurasi Pin Buzzer
Konfigurasi pin buzzer ditunjukkan di bawah ini. Buzzer terdiri dari dua pin, yaitu positif dan negatif. Terminal positifnya dilambangkan dengan simbol '+' atau terminal yang lebih panjang. Terminal ini dialiri daya melalui 6 Volt sedangkan terminal negatifnya dilambangkan dengan simbol '-' atau terminal pendek dan dihubungkan ke terminal GND.
Spesifikasi
Spesifikasi buzzer antara lain sebagai berikut.
Warnanya hitam
Rentang frekuensi 3.300Hz
Kisaran Suhu Operasional dari – 20° C hingga +60° C
Tegangan operasi berkisar dari 3V hingga 24V DC
Tingkat tekanan suara adalah 85dBA atau 10cm
Arus suplai di bawah 15mA
Jenis-jenis Buzzer
Buzzer tersedia dalam beberapa jenis, meliputi berikut ini.
Piezoelektrik
Elektromagnetik
Mekanis
Elektromekanis
Magnetik
Piezoelektrik
Seperti namanya, tipe piezoelektrik menggunakan efek piezoelektrik keramik piezoelektrik & arus pulsa untuk membuat pelat logam bergetar & menghasilkan suara. Jenis buzzer ini dibuat dengan kotak resonansi, multi resonator, pelat piezoelektrik, housing, impedance matcher, dll. Beberapa buzzer juga dirancang dengan LED .
11. Sensor DHT22
Sensor DHT22 adalah sensor digital yang dirancang untuk mengukur suhu dan kelembaban udara. Sensor ini sering digunakan dalam berbagai proyek elektronika karena akurasinya yang relatif tinggi, stabilitas jangka panjang, dan harga yang terjangkau. DHT22 merupakan versi yang lebih akurat dan memiliki rentang pengukuran yang lebih luas dibandingkan pendahulunya, DHT11.
Di dalam sensor DHT22 terdapat dua komponen utama:
Sensor Kelembaban Kapasitif: Untuk mengukur kelembaban, DHT22 menggunakan elemen sensor kelembaban kapasitif. Elemen ini terdiri dari dua elektroda yang dipisahkan oleh substrat penahan kelembaban. Ketika kelembaban udara berubah, kapasitas dielektrik dari substrat juga berubah, yang pada gilirannya mengubah nilai kapasitansi antara dua elektroda. Perubahan kapasitansi ini kemudian dikonversi menjadi sinyal digital yang merepresentasikan tingkat kelembaban.
Termistor NTC (Negative Temperature Coefficient): Untuk mengukur suhu, DHT22 menggunakan termistor NTC. Termistor adalah resistor peka suhu yang nilai resistansinya berubah secara signifikan dengan perubahan suhu. Pada termistor NTC, resistansinya akan menurun seiring dengan meningkatnya suhu. Perubahan resistansi ini diukur dan dikonversi menjadi nilai suhu digital.
Sensor DHT22 memiliki mikrokontroler internal kecil yang bertugas membaca data dari kedua sensor (kelembaban dan suhu), melakukan kalibrasi, dan mengubahnya menjadi format sinyal digital yang siap dibaca oleh mikrokontroler eksternal (seperti Arduino atau Raspberry Pi) melalui antarmuka data single-bus.
Spesifikasi Umum DHT22:
Rentang Pengukuran Suhu: -40°C hingga 80°C
Akurasi Suhu: ±0.5°C
Rentang Pengukuran Kelembaban: 0% hingga 100% RH (Relative Humidity)
Akurasi Kelembaban: ±2% RH
Tegangan Operasi: 3.3V hingga 5V
Sinyal Output: Digital (membutuhkan satu pin data)
Frekuensi Sampling: Maksimal 0.5 Hz (satu pembacaan setiap 2 detik)
12. Kabel Jumper
Jumper adalah kabel elektrik yang memiliki pin konektor di
setiap ujungnya dan berfungsi sebagai penghubung
dua komponen yang melibatkan Arduino tanpa
memerlukan solder.
Sistem monitoring dan otomatisasi penjemuran ikan asin ini dirancang untuk bekerja secara otomatis dengan mengandalkan berbagai sensor sebagai input dan mikrokontroler STM32 sebagai pengendali utama. Sensor DHT22 digunakan untuk mengukur suhu dan kelembaban udara di sekitar area penjemuran, kemudian hasil pembacaan tersebut ditampilkan secara real-time pada layar LCD 16x2 melalui komunikasi I2C. Selain itu, sistem juga dilengkapi dengan sensor hujan dan sensor LDR yang berfungsi mendeteksi kondisi cuaca dan intensitas cahaya. Apabila terdeteksi hujan oleh sensor rain dan intensitas cahaya rendah oleh sensor LDR, maka sistem akan mengaktifkan buzzer sebagai peringatan bahwa kondisi lingkungan tidak mendukung proses penjemuran. Untuk menjaga keamanan lingkungan penjemuran, sensor PIR digunakan untuk mendeteksi pergerakan manusia atau hewan. Jika sensor PIR mendeteksi adanya gerakan, buzzer juga akan diaktifkan sebagai sistem alarm. Seluruh data dari sensor diproses oleh STM32, dengan komunikasi antar perangkat dilakukan menggunakan protokol UART dan I2C. Sistem ini diprogram dan dikendalikan menggunakan Arduino IDE, yang mengatur logika kerja dari pembacaan sensor hingga pengendalian output seperti buzzer dan tampilan LCD.
BAHAN PRESENTASI UNTUK MATA KULIAH ELEKTRONIKA 2023 Nama : Bunga Olivia. A. F NIM : 2210951002 Dosen Pengampu : Dr. Darwison, MT Referensi : a. Darwison, 2010, ”TEORI, SIMULASI DAN APLIKASI ELEKTRONIKA ”, Jilid 1, ISBN: 978-602-9081-10-7, CV Ferila, Padang b. Darwison, 2010, ”TEORI, SIMULASI DAN APLIKASI ELEKTRONIKA ”,Jilid 2, ISBN: 978-602-9081-10-8, CV Ferila, Padang c. Robert L. Boylestad and Louis Nashelsky, Electronic Devices and Circuit Theory, Pearson, 2013 d. Jimmie J. Cathey, Theory and Problems of Electronic Device and Circuit, McGraw Hill, 2002. e. Keith Brindley, Starting Electronics, Newness 3rd Edition, 2005 f. Ian R. Sinclair and John Dunton, Practical Electronics Handbook, Newness, 2007. g. John M. Hughes, Practical Electronics: Components and Techniques, O’Reilly Media, 2016.


 Spesifikasi:
Spesifikasi:
 Spesifikasi:
Spesifikasi:




 Spesifikasi:
Spesifikasi: Spesifikasi:
Spesifikasi: Spesifikasi:1. Tegangan kerja: 4v-8v DC (optimal 5v)2. Arus max: 30mA / 5vDC3. Kekuatan suara max: 85dB / 10cm4. Frek resonansi: 2500 +/- 300hz5. Suhu kerja: -20 ~ +70 C6. Warna: hitam7. Diameter: 1cm
Spesifikasi:1. Tegangan kerja: 4v-8v DC (optimal 5v)2. Arus max: 30mA / 5vDC3. Kekuatan suara max: 85dB / 10cm4. Frek resonansi: 2500 +/- 300hz5. Suhu kerja: -20 ~ +70 C6. Warna: hitam7. Diameter: 1cm Spesifikasi:- Warna Backlight : hijau- Warna Text : hitam- Koneksi ke mcu : i2C (SDA SCL) / 0x27- i2C Address : 0x3F / 0x27- Lebih hemat GPIO karena hanya menggunakan 2wire saja (port SDA dan SCL)
Spesifikasi:- Warna Backlight : hijau- Warna Text : hitam- Koneksi ke mcu : i2C (SDA SCL) / 0x27- i2C Address : 0x3F / 0x27- Lebih hemat GPIO karena hanya menggunakan 2wire saja (port SDA dan SCL)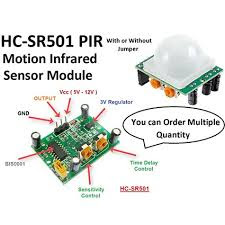







 duty cycle pwm
duty cycle pwm
 Keterangan :
t_ON = waktu ON atau waktu
dimana tegangan keluaran berada pada posisi tinggi (high atau 1)
t_OFF = waktu OFF atau waktu
dimana tegangan keluaran berada pada posisi rendah (low atau 0)
t_total = waktu satu siklus atau
penjumlahan antara t_ON dengan t_OFF atau disebut juga dengan “periode
satu gelombang”
Pada board Arduino Uno, pin yang dapat
digunakan untuk PWM adalah pin yang ditandai dengan tanda tilde (~), yaitu
pin 3, 5, 6, 9, 10, dan 11. Pin-pin ini dapat berfungsi sebagai input atau
output analog. Untuk menggunakan PWM pada pin tersebut, gunakan perintah
analogWrite().
PWM pada Arduino beroperasi pada frekuensi 500Hz, yang berarti ada 500
siklus per detik. Setiap siklus dapat diberi nilai antara 0 hingga 255.
Jika nilai 0 diberikan, pin tersebut akan selalu berada pada 0 volt. Jika
nilai 255 diberikan, pin akan selalu berada pada 5 volt. Memberikan nilai
127 (setengah dari 255 atau 50%) akan membuat pin berada pada 5 volt
selama setengah siklus dan 0 volt selama setengah siklus lainnya.
Memberikan nilai 64 (25% dari 255) akan membuat pin berada pada 5 volt
selama 1/4 siklus dan 0 volt selama 3/4 siklus, dan ini terjadi 500 kali
dalam satu detik.
Keterangan :
t_ON = waktu ON atau waktu
dimana tegangan keluaran berada pada posisi tinggi (high atau 1)
t_OFF = waktu OFF atau waktu
dimana tegangan keluaran berada pada posisi rendah (low atau 0)
t_total = waktu satu siklus atau
penjumlahan antara t_ON dengan t_OFF atau disebut juga dengan “periode
satu gelombang”
Pada board Arduino Uno, pin yang dapat
digunakan untuk PWM adalah pin yang ditandai dengan tanda tilde (~), yaitu
pin 3, 5, 6, 9, 10, dan 11. Pin-pin ini dapat berfungsi sebagai input atau
output analog. Untuk menggunakan PWM pada pin tersebut, gunakan perintah
analogWrite().
PWM pada Arduino beroperasi pada frekuensi 500Hz, yang berarti ada 500
siklus per detik. Setiap siklus dapat diberi nilai antara 0 hingga 255.
Jika nilai 0 diberikan, pin tersebut akan selalu berada pada 0 volt. Jika
nilai 255 diberikan, pin akan selalu berada pada 5 volt. Memberikan nilai
127 (setengah dari 255 atau 50%) akan membuat pin berada pada 5 volt
selama setengah siklus dan 0 volt selama setengah siklus lainnya.
Memberikan nilai 64 (25% dari 255) akan membuat pin berada pada 5 volt
selama 1/4 siklus dan 0 volt selama 3/4 siklus, dan ini terjadi 500 kali
dalam satu detik.
 Pada I2C, data
ditransfer dalam bentuk message yang terdiri dari
kondisi start, Address Frame, R/W bit, ACK/NACK bit,
Data Frame 1, Data Frame 2, dan kondisi Stop.
Kondisi start dimana saat pada SDA beralih dari logika
high ke low sebelum SCL.
Kondisi stop dimana saat pada SDA beralih dari logika
low ke high sebelum SCL.
R/W bit berfungsi untuk menentukan apakah master
mengirim data ke slave atau meminta data dari slave.
(logika 0 = mengirim data ke slave, logika 1 = meminta
data dari slave)
ACK/NACK bit berfungsi
sebagai pemberi kabar jika data frame ataupun address
frame telah diterima receiver.
Pada I2C, data
ditransfer dalam bentuk message yang terdiri dari
kondisi start, Address Frame, R/W bit, ACK/NACK bit,
Data Frame 1, Data Frame 2, dan kondisi Stop.
Kondisi start dimana saat pada SDA beralih dari logika
high ke low sebelum SCL.
Kondisi stop dimana saat pada SDA beralih dari logika
low ke high sebelum SCL.
R/W bit berfungsi untuk menentukan apakah master
mengirim data ke slave atau meminta data dari slave.
(logika 0 = mengirim data ke slave, logika 1 = meminta
data dari slave)
ACK/NACK bit berfungsi
sebagai pemberi kabar jika data frame ataupun address
frame telah diterima receiver.

 Fitur-Fitur Utama
- USB 2.0 Full-Speed
- 12-bit ADC hingga 10 channel
- DMA Controller
- Up to 7 timers (PWM, encoder interface, input
capture, output compare)
- Real-Time Clock (RTC)
- Nested Vectored Interrupt Controller (NVIC)
- LED Power Indicator
Fitur-Fitur Utama
- USB 2.0 Full-Speed
- 12-bit ADC hingga 10 channel
- DMA Controller
- Up to 7 timers (PWM, encoder interface, input
capture, output compare)
- Real-Time Clock (RTC)
- Nested Vectored Interrupt Controller (NVIC)
- LED Power Indicator
 Rain sensor
atau sensor hujan adalah perangkat
elektronik yang digunakan untuk mendeteksi
keberadaan dan intensitas air hujan. Sensor
ini umumnya terdiri dari sebuah plat
konduktif dengan pola jejak tembaga yang
terbuka (seperti jaring), yang bekerja
berdasarkan prinsip perubahan resistansi.
Saat plat sensor dalam kondisi kering,
resistansinya tinggi sehingga arus listrik
tidak mudah mengalir. Namun, ketika tetesan
air hujan membasahi permukaan sensor, air
(sebagai penghantar) menyebabkan penurunan
resistansi sehingga arus dapat mengalir
lebih mudah antara jalur-jalur konduktif
tersebut. Perubahan ini dapat dideteksi
sebagai sinyal analog atau digital
tergantung jenis output sensor yang
digunakan.
Pada sistem
yang menggunakan sinyal analog, output dari
rain sensor biasanya dihubungkan ke pin ADC
(Analog to Digital Converter) pada
mikrokontroler. Nilai tegangan analog yang
terbaca mencerminkan tingkat kekeringan atau
kebasahan sensor: nilai tinggi menunjukkan
kondisi kering, dan nilai rendah menandakan
adanya air hujan. Sensor ini dapat
dikalibrasi dengan menetapkan batas minimum
dan maksimum nilai ADC untuk mengonversi
data menjadi persentase tingkat kelembaban
atau intensitas hujan. Berikut grafik respon
dari sensor rain:
Rain sensor
atau sensor hujan adalah perangkat
elektronik yang digunakan untuk mendeteksi
keberadaan dan intensitas air hujan. Sensor
ini umumnya terdiri dari sebuah plat
konduktif dengan pola jejak tembaga yang
terbuka (seperti jaring), yang bekerja
berdasarkan prinsip perubahan resistansi.
Saat plat sensor dalam kondisi kering,
resistansinya tinggi sehingga arus listrik
tidak mudah mengalir. Namun, ketika tetesan
air hujan membasahi permukaan sensor, air
(sebagai penghantar) menyebabkan penurunan
resistansi sehingga arus dapat mengalir
lebih mudah antara jalur-jalur konduktif
tersebut. Perubahan ini dapat dideteksi
sebagai sinyal analog atau digital
tergantung jenis output sensor yang
digunakan.
Pada sistem
yang menggunakan sinyal analog, output dari
rain sensor biasanya dihubungkan ke pin ADC
(Analog to Digital Converter) pada
mikrokontroler. Nilai tegangan analog yang
terbaca mencerminkan tingkat kekeringan atau
kebasahan sensor: nilai tinggi menunjukkan
kondisi kering, dan nilai rendah menandakan
adanya air hujan. Sensor ini dapat
dikalibrasi dengan menetapkan batas minimum
dan maksimum nilai ADC untuk mengonversi
data menjadi persentase tingkat kelembaban
atau intensitas hujan. Berikut grafik respon
dari sensor rain:
 Spesifikasi :
- Catu Daya : 5 V
- Output Arus : 100 mA
- Output Sinyal : TTL
- Sensitifitas : Dapat disesuaikan
sesuai kebutuhan dengan
potensiometer
- Dilengkapi indikator LED
- Sensor dan panel kontrol dipisah
untuk mendapatkan kinerja yang
optimal
- Dimensi Panel Kontrol : 30 x 16
mm
- Dimensi Sensor : 54 x 40 mm
Spesifikasi :
- Catu Daya : 5 V
- Output Arus : 100 mA
- Output Sinyal : TTL
- Sensitifitas : Dapat disesuaikan
sesuai kebutuhan dengan
potensiometer
- Dilengkapi indikator LED
- Sensor dan panel kontrol dipisah
untuk mendapatkan kinerja yang
optimal
- Dimensi Panel Kontrol : 30 x 16
mm
- Dimensi Sensor : 54 x 40 mm






 7. Sensor LDR Sensor LDR (Light Dependent Resistor), atau sering disebut sebagai fotodiode atau fotoresistor, adalah komponen pasif yang nilai resistansinya berubah-ubah tergantung pada intensitas cahaya yang mengenainya. Semakin terang cahaya yang mengenai permukaan LDR, resistansinya akan semakin menurun. Sebaliknya, semakin gelap kondisi di sekitar LDR, resistansinya akan semakin meningkat. Karakteristik ini membuatnya sangat cocok untuk mendeteksi tingkat cahaya.
7. Sensor LDR Sensor LDR (Light Dependent Resistor), atau sering disebut sebagai fotodiode atau fotoresistor, adalah komponen pasif yang nilai resistansinya berubah-ubah tergantung pada intensitas cahaya yang mengenainya. Semakin terang cahaya yang mengenai permukaan LDR, resistansinya akan semakin menurun. Sebaliknya, semakin gelap kondisi di sekitar LDR, resistansinya akan semakin meningkat. Karakteristik ini membuatnya sangat cocok untuk mendeteksi tingkat cahaya.
 Sel Resistor Tergantung Cahaya atau Cell Light Dependent Resistor (LDR) adalah Sensor cahaya photoresistif yang paling umum digunakan adalah sel fotokonduktif Cadmium Sulphide ORP12. Resistor yang bergantung pada cahaya ini memiliki respon spektral sekitar 610nm di wilayah cahaya kuning ke oranye. Resistansi sel ketika tidak menyala (resistansi gelap) sangat tinggi pada sekitar 10MΩ yang jatuh ke sekitar 100Ω ketika sepenuhnya diterangi (resistansi terang). Untuk meningkatkan resistansi gelap dan karenanya mengurangi arus gelap, jalur resistif membentuk pola zig-zag melintasi substrat keramik. Photocell CdS adalah perangkat dengan biaya sangat rendah yang sering digunakan dalam peredupan otomatis, deteksi gelap atau senja untuk menyalakan lampu jalan "ON" dan "OFF", dan untuk aplikasi jenis meteran eksposur fotografi.
Sel Resistor Tergantung Cahaya atau Cell Light Dependent Resistor (LDR) adalah Sensor cahaya photoresistif yang paling umum digunakan adalah sel fotokonduktif Cadmium Sulphide ORP12. Resistor yang bergantung pada cahaya ini memiliki respon spektral sekitar 610nm di wilayah cahaya kuning ke oranye. Resistansi sel ketika tidak menyala (resistansi gelap) sangat tinggi pada sekitar 10MΩ yang jatuh ke sekitar 100Ω ketika sepenuhnya diterangi (resistansi terang). Untuk meningkatkan resistansi gelap dan karenanya mengurangi arus gelap, jalur resistif membentuk pola zig-zag melintasi substrat keramik. Photocell CdS adalah perangkat dengan biaya sangat rendah yang sering digunakan dalam peredupan otomatis, deteksi gelap atau senja untuk menyalakan lampu jalan "ON" dan "OFF", dan untuk aplikasi jenis meteran eksposur fotografi.












Komentar
Posting Komentar